2025年11月20日
星期四
近日,合肥工业大学工业与装备技术研究院常龙飞副研究员、胡颖研究员团队,在前期光响应自振荡智能驱动器基础上,联合爱沙尼亚塔尔图大学LMS实验室,设计了一种具有光、电、热、湿度等多刺激源响应的柔性智能驱动/传感材料,并在此基础上开发了可自适应趋光/背光运动的软体机器人以及在太阳光照射下产生电能的光致发电装置。该研究工作以“A Versatile Ionomer-based Soft Actuator with Multi-stimulus Responses, Self-Sustainable Locomotion, and Photoelectric conversion”为题发表在Advanced Functional Materials期刊上。
具有高灵敏的多刺激源响应柔性智能材料和自主持续运动的软驱动器,在柔性机器人、可穿戴设备、人机交互、人工智能等领域具有重要应用价值,是近年来材料科学及工程技术领域的前沿课题,也是一个极具挑战的目标。
该团队利用全氟磺酸离子聚合物独特的液固共存体系、纳米质量传递通道、高负热膨胀和高吸湿敏感性,碳纳米管(CNT)出色的光热/电热转换效率和桥接效应以及聚乙烯(PE)的各向异性大热膨胀性能,设计制备了一种新的双层结构智能材料。该智能材料具有极高的温湿度敏感性以及在光、电、热、湿度等多种刺激源驱动下的优异的多样化变形行为,包括大弯曲和螺旋卷绕/开卷变形。进一步通过光-机械自反馈的结构设计,研发了多种软体机器人原型机,如具有自主运动能力(根据光照位置的不同来自我调节产生趋光运动和背光运动)和适应不同地形或负载条件(能够越障和攀爬)的软体机器人,以及在自然太阳光下进行持续自震荡运动、将太阳能转换为电能的光致变形摩擦纳米发电机。
该工作中提出的柔性智能材料及相关的软体机器人不仅具有多样化的驱动/传感行为、优异的智能运动特性,还具有高稳定性和可重复性,为后续的多功能柔性微型机器人以及新型能源器件的研究提供了基础和实现的可能性。
上述研究工作得到国家自然科学基金、CSC访问学者奖学金、欧盟地平线2020研究和创新计划等资助,常龙飞副研究员、硕士生王冬平为共同第一作者,爱沙尼亚塔尔图大学LMS实验室的Alvo Aabloo教授参与指导,胡颖研究员为通讯作者。
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/adfm.202212341?af=R
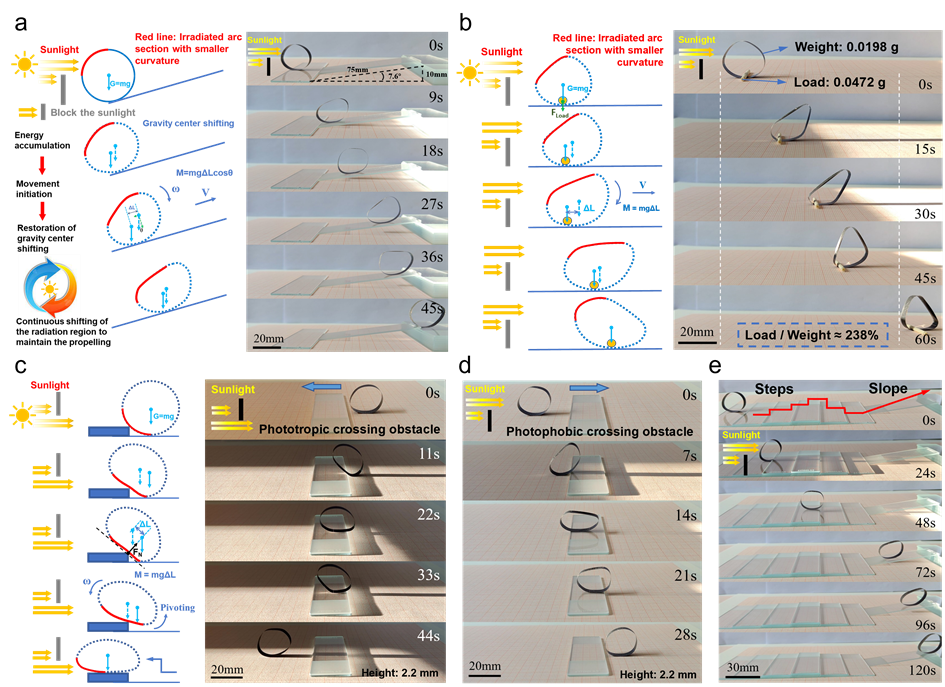
图1:在光照射下具有自持续运动的轮式软体机器人(趋光/背光运动及自适应负载、越障行为)

图2:CNT-Nafion/PE构建的光照下可持续自振荡软体机器人、摩擦纳米发电机以及将太阳能转换为电能的光致发电装置
网站内容来源于互联网,由网络编辑负责审查,目的在于传递信息,提供专业服务,不代表本网站平台赞同其观点和对其真实性负责。如因内容、版权问题存在异议的,请与我们取得联系,我们将协调给予处理(按照法规支付稿费或删除),联系方式:ahos@aiofm.ac.cn 。网站平台将加强监控与审核,一旦发现违反规定的内容,按国家法规处理,处理时间不超过24小时。
版权所有:安徽省光学学会(社证字第 0156号)
地址:安徽省合肥市蜀山湖路350号中科院安徽光机所一号楼
EMAIL:ahos@aiofm.ac.cn
