2025年11月26日
星期三
望远镜的发明及其性能的提升使得人们能够逐步观察到更远、更暗的物体。但是风力矩、平台晃动、结构振动等外部干扰力矩会引起望远镜的光轴振动,从而影响成像质量和其观察微弱目标的能力。因此,为了达到望远镜的衍射极限,必须抑制光轴振动对望远镜的成像影响。
在传统的闭环反馈控制方法中,由于图像传感器本身具有采样频率低、曝光时间长的因素,给控制回路带来了时间延迟,限制了闭环控制的带宽,难于抑制宽频以及大幅度的振动。由此,学者们相继提出了许多新颖的振动抑制方法,如线性二次高斯(linear quadratic Gaussian, LQG)控制和扰动前馈(disturbance feed forward, DFF)控制。已有的实验结果表明,这些方法确实提高了系统的闭环性能,但它们计算耗时长,更重要的是需要依赖于控制系统模型以及扰动模型的辨识精度。
为了降低对精确模型的依赖以及提高算法的实时性,相关学者们提出了扰动观测器控制方法。以光电所为依托单位的中国科学院光束控制重点实验室的研究人员重点开展了基于误差的扰动观测器的研究,在不增加控制带宽的前提下仅仅利用图像传感器,通过引入不改变闭环极点的低通类型滤波器,减轻控制模型的依赖,增强闭环性能的鲁棒性,从而提高对中、高频扰动的抑制能力,减小了振动对光轴的影响。
研究团队综述了当前望远镜中关于振动抑制的控制技术:比例积分(proportional integral, PI)控制、线性二次高斯(LQG)控制、扰动前馈(DFF)控制和基于倾斜镜的扰动观测器(disturbance observer, DOB)控制的研究现状,对它们进行了系统、全面的比较,并通过控制系统的灵敏度函数分析了它们各自的优缺点。现有的控制方法依赖于精确的系统模型以及准确的扰动信号。研究团队提出的基于误差的扰动观测器(error-based disturbance observer)方法可以通过设计合理的Q滤波器来降低对精确的系统模型的依赖,并且不增加额外的传感器。该综述重点介绍了此种控制器的原理、设计方法,并在此基础上针对复杂的扰动设计了不同类型滤波器。综合实验结果可以知道,基于误差的观测器控制方法不仅可以极大程度地衰减干扰频率处的扰动,而且在非干扰频率处也不会有较大的放大作用(waterbed effect)。
论文链接:http://www.oejournal.org/J/OEA/Article/Details/A191018000018
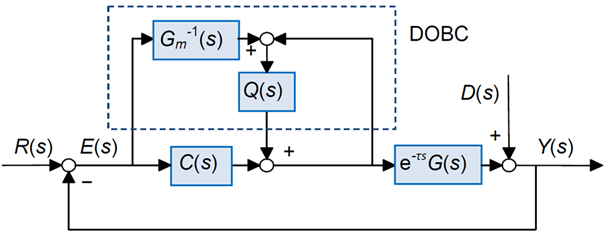
图1 基于误差的DOBC倾斜镜结构
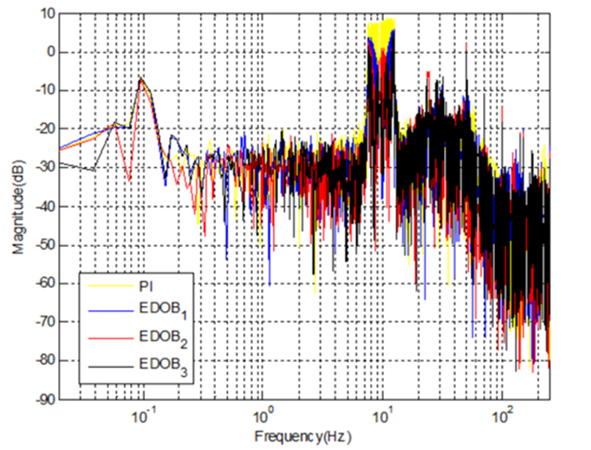
图2 误差抑制频率响应
新闻链接:http://www.ioe.cas.cn/xwdt2019/kydt/202008/t20200820_5662607.html
免责声明:
网站内容来源于互联网,由网络编辑负责审查,目的在于传递信息,提供专业服务,不代表本网站平台赞同其观点和对其真实性负责。如因内容、版权问题存在异议的,请与我们取得联系,我们将协调给予处理(按照法规支付稿费或删除),联系方式:ahos@aiofm.ac.cn 。网站平台将加强监控与审核,一旦发现违反规定的内容,按国家法规处理,处理时间不超过24小时。
版权所有:安徽省光学学会(社证字第 0156号)
地址:安徽省合肥市蜀山湖路350号中科院安徽光机所一号楼
EMAIL:ahos@aiofm.ac.cn
